|
2.4 Registriermethoden 2.4.1 Vorversuche mit Zeitraffer-Videoaufnahmen In der Arbeit von SCHUSTER (1996) über
die Circumnutationen von Arabidopsis
thaliana und Cardaminopsis
arenosa wurden hauptsächlich
Registrierungen der Hypokotyle bei Aufnahme von oben durchgeführt.
Dazu kamen wenige Registrierungen von der Seite. Die Versuchsdaten
waren nicht als Bilder abgespeichert worden. Aufnahmen verschiedener Keimlinge von oben mit Atari-Computern und dem Programm OXALIS wurden in der von SCHUSTER (1996) beschriebenen Weise durchgeführt. Als Kameras standen mehrere einfache no-name schwarz-weiß Videokameras mit reduzierter Zeilenzahl zur Verfügung. Mit diesen Versuchen sollten zwei Fragestellungen geklärt werden: 2.4.2.1.1 Wie ändern sich die Periodenlängen der Circumnutationen im Laufe des Wachstums der Keimlinge? Hierzu wurden die mit dem Atari-System gewonnenen Daten zunächst auf einen PC übertragen. Die Rohdaten wurden mit dem Programm "arab" einer Frequenzanalyse unterzogen. Mit Hilfe eines graphischen Interface wurden Intensität und Periodenlänge der Schwingungen über die Zeit aufgetragen.
Wässrige Expansin-Lösungen, Referenzlösungen und andere gelöste Substanzen wurden mittels einer On-Column Spritze in der beschriebenen Weise an verschiedenen Stellen des Hypokotyls und an den Kotyledonen appliziert. Die Atari-Daten wurden auf einen PC übertragen und mit Hilfe des dafür entwickelten Programms "pb" auf dem Bildschirm angezeigt oder mit dem Programm "print-odo" auf einem Farbdrucker ausgedruckt.
In der vorliegenden Arbeit sollte versucht
werden, zu beschreiben und möglicherweise zu erklären,
wie und wo am Hypokotyl die Circumnutationen entstehen. Hierzu
wurden Beads an verschiedenen Stellen des Hypokotyls der Keimlinge
angeheftet, wie unter 2.2.2 beschrieben. Die vertikalen und horizontalen
Bewegungen der einzelnen Beads sowie der Kotyledonen wurden mit
"tracking-Feldern" des OXALIS-Programs aufgezeichnet.
Die so gewonnenen Rohdaten der Bewegung in x- und y-Richtung wurden
in ein Tabellenkalkulationsprogramm importiert und die Bewegung
der einzelnen Beads auf einem Keimling grafisch dargestellt. 2.4.3 Registrierungen mit dem PC 2.4.3.1 Wahl des Betriebssystems Das Betriebssystem LINUX zeichnet sich neben vielen anderen Vorzügen durch besondere Stabilität aus. Für die geplanten Langzeitregistrierungen erschien es somit besonders geeignet. Für diverse komplexe Steuervorgänge, Datenerfassungs-, Speicher und Komprimierungsaufgaben stellt es mit der Shellscript- Programmiersprache "bash" ein flexibles und mächtiges Werkzeug bereit. Alle Quellcodes sind frei verfügbar und es gibt keine teure Lizenzierung, was den Austausch mit anderen Arbeitsgruppen erleichtert. 2.4.3.2 Kameras, PC-Hardware und Peripherie Mit dem geplanten Aufnahmesystem sollten Keimlinge bei starker Vergrößerung und in guter Qualität aufgenommen werden. Kleine, ortskonstante Strukturen auf den wachsenden Hypokotylen ("natürliche Marker") sollten als Referenzpunkte für die anschließende Auswertung erfasst werden. Die Bilddaten wurden deshalb mit hochauflösenden schwarz-weiß Videokameras [1] aufgenommen. Die Videosignale wurden mit Framegrabberkarten [2] digitalisiert, bearbeitet und auf der Festplatte eines PCs [3] gespeichert. Aufeinander folgende Bilder konnten automatisch in regelmäßigen, frei wählbaren Zeitabständen erzeugt und abgelegt werden. Als Objektive für die Kameras erwiesen sich M42-Schraubobjektive mit 50 mm Brennweite [4] als geeignet. Sie wurden über einen Adapter am C-Mount-Anschluß der Videokameras montiert. Solche Objektive ließen sich sehr günstig gebraucht im Fotohandel beschaffen. Durch mehrere Zwischenringe konnte der gewünschte große Abbildungsmaßstab realisiert werden. Außerdem bewirkten die M42-Objektive, die eigentlich für Kleinbildformat ausgelegt sind, hier jedoch auf einen lediglich 1/3 Inch großen CCD-Chip abbilden, eine zusätzliche Vergrößerung. Für die geplanten Versuche war es auch erforderlich, Aufnahmen bei völliger Dunkelheit oder im Licht-Dunkel-Wechsel durchführen zu können. Hierfür wurde eine Infrarotlichtquelle aus einer Matrix aus Infrarot-LEDs [5] aufgebaut. Die Leistung der Lichtquelle war über eine Stromquellenschaltung in weiten Bereichen regulierbar. In Experimenten mit Keimlingen, die in totaler Dunkelheit oder in Dunkelheit mit zusätzlicher Beleuchtung durch IR-LEDs wuchsen, wurde untersucht, ob sich Unterschiede in Länge oder Habitus ergaben. Dies war nicht der Fall. Licht von unterschiedlicher Wellenlänge wird von Kameraobjektiven verschieden stark gebrochen. Dies führt zu Brennweitenunterschieden in Abhängigkeit von der Wellenlänge des Lichts. Gleichzeitige Beleuchtung der Objekte mit sichtbarem Licht und mit Infrarotlicht liefert deshalb unscharfe Bilder. Mit Hilfe eines Filters, das nur für infrarotes Licht, nicht aber für sichtbares Licht durchlässig ist, konnte dieses Problem gelöst werden. Als Filtermaterial war gewöhnlicher, völlig belichteter, entwickelter Schwarz-Weiß-Film gut geeignet. Ein passendes Stück Film wurde zwischen Objektiv und CCD-Chip der Videokamera montiert. Das als Filter verwendete Filmmaterial wies oft winzige Kratzer und Unregelmäßigkeiten auf. Deshalb durfte es nicht direkt über dem Bildwandler der Kamera befestigt werden, da diese Strukturen sonst im Bild sichtbar wurden. Das Filter wurde stattdessen hinter der Linse am vorderen Ende der Zwischenringe montiert. Mit der Aufnahme von jeweils nur einer Pflanze pro Versuch wären die Experimente und die Fragestellungen innerhalb des vorgegebenen Zeitrahmens einer Dissertation nicht realisierbar gewesen. Deshalb wurde eine Anlage geplant und entwickelt, mit deren Hilfe eine größere Anzahl von Keimlingen kontinuierlich aufgenommen werden konnte. Versuche, mehrere Pflanzen mit einer einzigen feststehenden Kamera zu erfassen, wurden nach kurzer Zeit wieder eingestellt. Hierfür war ein kleinerer Abbildungsmaßstab nötig gewesen, was die Aufnahmequalität wesentlich verschlechterte. Außerdem kam es durch Wachstumsvorgänge und Schwingungen der eng stehenden Pflanzen leicht zu optischen Überschneidungen. Mehrere Versuchsobjekte mit mehreren Kameras simultan aufzunehmen, ließ sich aus Kostengründen nicht durchführen. Für die Registrierung der meist nur wenige Millimeter großen Keimlinge waren handelsübliche, billige Überwachungskameras ungeeignet. Eine größere Anzahl guter Kameras mit entsprechenden Objektiven und Zubehör war nicht finanzierbar. Geeignet erschien eine Verfahreinheit, die in der Lage ist, entweder Kameras oder Versuchsobjekte oder evtl. auch beides zeitgesteuert zu bewegen, in regelmäßigen Abständen Aufnahmen der einzelnen Objekte zu machen und diese in geeigneter Form auf einem Datenträger zu speichern. Bei der Registrierung sollten alle Pflanzen nacheinander in Aufnahmeposition gebracht und registriert werden. Dies liefert die Bilder der Pflanzen in einem Abtastvorgang ("scan"). Nach Aufnahme der letzten Pflanze wird wieder die Startposition angefahren, wobei die Anlage auch neu kalibriert wird. Nach Ablauf der Abtastperiode von beispielsweise 4 Minuten beginnt der nächste scan. 2.4.3.4.1 Prototyp einer Verfahreinheit unter Verwendung eines umgebauten 5 ¼" Floppydrives Um erste Erfahrungen zu sammeln, wurde eine kleine Verfahreinheit auf der Basis eines handelsüblichen 5 ¼" Diskettenlaufwerks entwickelt. Diese Laufwerke besitzen eine Positioniereinheit für den Lese-Schreibkopf, welcher sehr präzise und linear über der rotierenden Diskette verfahren werden kann. Sie wurde zum Verfahren einiger Pflanzen benutzt. Alle elektronischen und mechanischen Teile des Laufwerks bis auf das Metallgehäuse, die Führungsschienen und den Schrittmotor zur Positionierung des Schreib-Lesekopfes wurden ausgebaut. Auf den Träger des Schreib-Lesekopfes wurde ein Kunststoffkästchen (Abmessungen 4,5*3,5*1,5 cm) mit abnehmbarem Deckel montiert. Vor den Versuchen wurde das Kästchen mit Leitungswasser gefüllt. Auf dem Deckel wurde ein Stück schwarzes Filterpapier montiert. Der Deckel besaß einen Rand von ca. 1 mm Höhe, der das Filterpapier in Position hielt. Es wurde über einen Docht aus Filterpapier, der durch einen Schlitz in das Innere des Kästchens ragte, feucht gehalten und diente als Auflage und zur Wasserversorgung der zu untersuchenden Keimlinge. Diese waren in der bereits beschriebenen Weise auf Filterpapierscheibchen angezogen worden. Sie wurden vor Versuchsbeginn auf der Verfahreinheit montiert. Der Schrittmotor wurde über einen Mikrocomputer [6] ("periphere Prozessoreinheit" (PPU)) angesteuert. Die PPU war über die serielle Schnittstelle mit einem PC verbunden. Über Kleinleistungstransistoren wurden die Wicklungen des Schrittmotors angesteuert. Zur Stromversorgung diente ein handelsübliches Steckernetzteil mit 12V Spannung. Die Positionierbefehle des PCs wurden von der PPU in Stromflußzustände für die Wicklungen des Schrittmotors umgerechnet. Die zeitliche Abfolge der Impulse wurde über Tabellen bestimmt, da die Leistungsfähigkeit der PPU zu einer Berechnung in Echtzeit nicht ausreichte. Außerdem sind tabellengesteuerte Algorithmen flexibler anzupassen. Die Tabellen waren empirisch so festgelegt, dass Vibrationen und Resonanzen beim Verfahren minimiert wurden. "Mikropositionierung", bei der die Spulen des Schrittmotors in definierten Stromverhältnissen zueinander angesteuert wurden, erlaubte ein sehr vibrationsarmes Verfahren. In späteren Ausführungen wurde versucht, höhere Verfahrgeschwindigkeiten zu realisieren. Dabei treten beim Anfahren und Anhalten große Beschleunigungen auf. Um diese zu vermeiden, waren Beschleunigungs- und Bremsvorgänge nötig, die ebenfalls über Tabellen kontrolliert wurden. Diese erste Anlage hatte einen Verfahrweg von ca. 3 cm. Damit konnten maximal etwa 5 Keimlinge in einem Versuch registriert werden. Mit dieser Anlage sollte geprüft werden, ob die Positionierung genau genug war und ob die beim Verfahren der Pflanzen unvermeidbaren Erschütterungen das Wachstum oder das Bewegungsverhalten beeinflussen. Dies schien nicht der Fall zu sein, was auch zuvor schon Wachstumsversuche auf einem Rüttler ergeben hatten. Die Beschränkung auf 5 Pflanzen pro Versuch war jedoch der Grund, eine größere Anlage zu planen. Aus experimentellen Gründen wurden dabei die Kameras und nicht die Objekte verfahren. Feststehende Keimlinge waren leichter zu beleuchten und mit Wasser zu versorgen als bewegte Keimlinge. Außerdem bestand beim Bewegen der Pflanzen das Risiko, dass sie auf ihrer Unterlage verrutschen und die Reaktionen der Pflanzen beeinflusst wurden. 2.4.3.4.2 Verfahreinheit mit zwei Videokameras unter Verwendung eines umgebauten Nadeldruckers Wachstums- und Bewegungsvorgänge von Pflanzen finden in allen drei räumlichen Dimensionen statt. Um solche Vorgänge zu registrieren, sind Stereoaufnahmen notwendig. Für Stereoaufnahmen bewegter Objekte müssen diese von zwei Kameras aus unterschiedlichen Richtungen möglichst zeitgleich erfasst werden. Bei einem Kamerawinkel von 90° werden optimale Ergebnisse erzielt und aufnahmebedingte Fehler und Toleranzen werden verringert. Aber auch spitzere oder stumpfere Kamerawinkel führen zu verwertbaren Aussagen, solange der Winkel bekannt ist. Zwei Kameras wurden auf einem gemeinsamen Träger frei drehbar und gegeneinander verschiebbar montiert. Der Fokus beider Kameras ließ sich so auf einen Punkt einstellen, was Grundbedingung für Stereoaufnahmen ist. Der Abbildungsmaßstab beider Kameras wurde durch mehrere Zwischenringe unterschiedlicher Länge grob eingestellt. Da die Versuchobjekte meist nur wenige Millimeter groß waren und bildfüllend dargestellt werden sollten, waren Zwischenringlängen von bis zu 10 cm erforderlich. Die Feinregulierung des Abbildungsmaßstabs erfolgte mit Hilfe der Fokussierringe der Objektive. Wird der Fokussierring voll gedreht, verändert sich der Abstand des Objektivs vom Film oder Bildwandler um nur wenige Millimeter. Verglichen mit den langen Zwischenringen war diese Änderung nur sehr gering und wirkte sich somit entsprechend wenig aus. Wird der Abbildungsmaßstab durch unterschiedlich lange Zwischenringe verändert, muss auch der Objektabstand verändert werden. Die Entfernung der jeweiligen Kamera vom Objekt musste also parallel zur Veränderung des Maßstabs reguliert werden. Leider standen keine zwei identischen Kameras und auch keine identischen Objektive zur Verfügung. Dadurch wurde das Einstellen und Fokussieren sehr erschwert. Es war wegen der recht simplen Konstruktion des Kameraträgers nur sehr schwer möglich, manuell einen absolut identischen Abbildungsmaßstab beider Kameras und zugleich einen Kamerawinkel von genau 90° einzustellen. Deshalb mussten im Registrierprogramm Unterschiede im Abbildungsmaßstab berücksichtigt werden. Bei größeren Objekten, die einen geringeren Abbildungsmaßstab und somit einen größeren Abstand von den Objektiven erforderten, war aufgrund der begrenzten Breite des Kameraträgers ein Kamerawinkel kleiner 90 ° erforderlich. Eine Korrektur dieser Abweichung vom rechten Winkel wurde ebenfalls per Programm vorgenommen. Um mit den beiden Kameras in kurzen zeitlichen Abständen mehrere Objekte aufnehmen zu können, sollte der gesamte Kameraträger in horizontaler Richtung automatisch verfahren werden. Hierzu wurde ein Nadeldrucker[7] verwendet. Dieser Drucker schien besonders gut geeignet, da sein Druckkopf auf zwei parallelen, massiven Stahlachsen gleitend und spielfrei geführt wird. Der Kameraträger mit beiden Kameras und Objektiven besaß ein wesentlich höheres Gewicht als der Druckkopf und erforderte daher eine solide Führung. Der Druckkopf wurde abmontiert und an seine Stelle ein speziell angefertigter Aluminiumklotz als Unterlage für den eigentlichen Kameraträger geschraubt. Der Träger wurde aus 5mm starkem Aluminiumblech gefertigt. Mit Hilfe von entsprechenden Schlitzen, Winkeln, Bohrungen und Verschraubungen wurde die nötige Variabilität der Kamerabefestigung realisiert. Der Drucker wurde wieder mit einer PPU und über die serielle Schnittstelle eines PCs angesteuert. Um die Steuersignale der PPU in Ströme am Schrittmotor des Druckers umzusetzen, wurden die im Drucker vorhandenen Treibertransistoren sowie die druckerinterne Spannungsversorgung verwendet. Die ursprüngliche Verbindung der Treibertransistoren zur internen Steuerhardware auf der Leiterbahnplatine des Druckers wurde durchtrennt. Die im Drucker vorhandenen Endabschalter wurden verwendet, um das Verfahren der Kameras seitlich zu begrenzen und die Einheit zu kalibrieren.
In der dritten Ausbaustufe wurde eine Anlage zum dreidimensionalen Verfahren zweier Kameras aufgebaut. Diese größer dimensionierte Anlage basierte auf einer CNC- Maschine[8], die aus drei Lineareinheiten mit Gewindetrieben und Schrittmotoren bestand. Um Wachstumsvorgänge der Hypokotyle möglichst genau beobachten zu können, mussten die Pflanzen möglichst hochauflösend und in möglichst großem Abbildungsmaßstab aufgenommen werden. Bei feststehenden Kameras oder bei der eindimensionalen Verfahreinheit wuchsen die Pflanzen jedoch bei größeren Bildmaßstäben rasch aus dem Bildrahmen heraus. Deshalb musste ein Kompromiss zwischen Abbildungsmaßstab und Bildqualität geschlossen werden. Insbesondere bei Cardaminopsis, die bei niedrigen Beleuchtungsstärken Hypokotyle von bis zu 5 cm Länge mit nur ca. 1 mm Dicke entwickelt, war bei bildfüllender Darstellung die Auflösung für komplexe Bildanalyseverfahren nicht ausreichend. Deshalb wurde eine dreidimensionale Verfahreinheit entwickelt, mit der mehrere Pflanzen zeitsynchron aufgenommen und auch mehrere übereinanderliegende Bilder eines Objekts angefertigt werden konnten. Die übereinanderliegenden Bilder sollten anschließend rechnerisch zu einem einzigen Bild zusammengefügt und danach ausgewertet werden. Die Lineareinheit für das horizontale Verfahren ("x-Achse"), trug eine vertikale Lineareinheit (z-Achse). Auf ihr wurde ein trapezförmiger Kameraträger mit Längsschlitzen am Rande der Schenkel montiert. Die Kameras konnten verschiebbar montiert werden, wobei der rechte Winkel bereits vorgegeben war. Die y-Achse der Anlage war als horizontale, massive, geschlitzte Metallplatte ausgelegt, die sich unterhalb von x-Achse und z-Achse befand und nach vorne und hinten verfahren werden konnte. Auf dieser Metallplatte wurden die Pflanzen wie nachfolgend beschrieben aufgebaut. Bei Stereoaufnahmen ist es nicht sinnvoll, ein Objekt aus dem Schnittpunkt der Kameraachsen heraus zu bewegen. Ein Verfahren in y-Achse war für den Fall gedacht, dass Pflanzen schief wuchsen und sich dadurch nicht mehr im Fokus der Kameras befanden. Außerdem bestand die Möglichkeit, die Pflanzen auf der Unterlage manuell nur grob zu positionieren und danach durch Verfahren der Unterlage fein einzustellen. Die Ansteuerung der drei Schrittmotoren der CNC- Maschine erfolgte durch je zwei Vollbrücken aus POWER-MOSFET-Transistoren, die über integrierte Treiberstufen und Hochgeschwindigkeits-Optokoppler wie zuvor von einer PPU gesteuert wurden. Jeweils ein Endschalter an den Startpositionen der Lineareinheiten diente zur Kalibrierung und als Notausschalter bei Positionierfehlern. Das zuvor benutzte PPU- Programm wurde so erweitert, dass damit alle drei Achsen einzeln verfahren werden konnten. Ein simultanes Verfahren zweier Achsen war aufgrund der beschränkten Leistung der PPU nicht möglich und auch nicht erforderlich. Wegen der größeren Verfahrwege
und höheren Schrittzahl wurde die Anlage genauer. Allerdings
waren nun Beschleunigungs- und Bremsvorgänge nötig,
um die Verfahrzeiten kurz zu halten. Durch Mikropositionierung
wurde das langsame Verfahren der y-Achse, welches nur zur Refokussierung
diente, vibrationsarm gestaltet. 2.4.3.5 Software zum Steuern der eindimensionalen und dreidimensionalen Verfahreinheit; Versuchsaufbau bei der Registrierung Zum Einstellen der Pflanzen zu Beginn einer Registrierung, zum Digitalisieren von Bildern und zur Bildkompression wurden Programme entwickelt. Diese wurden teils von der Kommandozeile, teils zeitgesteuert vom "cron"-daemon des LINUX-Systems gestartet. 2.4.3.5.1 Eindimensionale Verfahreinheit Bei Beginn jedes neuen Versuchs galt es, viele Pflanzen in bezug auf die beiden Kameras der Verfahreinheit möglichst effizient zu positionieren und scharfzustellen. Hierzu wurde für die eindimensionale Verfahreinheit das X-Programm "einstellen" entwickelt. Mit ihm konnte die Verfahreinheit auf beliebige Positionen eingestellt werden. Für die einzelnen Pflanzen war jeweils eine Schaltfläche vorhanden. Durch Anklicken dieser Schaltflächen konnten die einzelnen Pflanzen angefahren werden. Die gespeicherte Position der Pflanze konnte bei Bedarf verändert werden. Während des Versuchs wurden die Positionen der Pflanzen dann periodisch angefahren. Aus experimenteller Sicht hat sich eine äquidistante
Anordnung der Keimlinge auf einer gemeinsamen Unterlage als günstig
erwiesen. Hierzu wurden den Schaltflächen Positionen in regelmäßigen
Abständen zugewiesen und die Pflanzen nach diesen Positionen
ausgerichtet. Um den ersten Keimling zu montieren, wurde die Verfahreinheit durch Anklicken der ersten Schaltfläche in Position 1 gebracht. Unter der X-Oberfläche von LINUX wurden die beiden Kamerasignale in Echtzeit in zwei Fenstern dargestellt. Die Pflanze wurde mit ihrem Filterpapierscheibchen so auf der Unterlage positioniert, dass sie sich in bezug auf beide Kameras in der Mitte des Bildes befand. Die Kameras wurden scharf gestellt. Mit einer möglichst kleinen Blende wurde eine maximale Tiefenschärfe erreicht. Nachdem die erste Pflanze eingerichtet war, wurde die zweite Schaltfläche aktiviert und damit die nächste Position angefahren. Die zweite Pflanze wurde so montiert, dass sie ebenfalls in der Mitte beider Kamerabilder erschien und somit von beiden Kameras scharf gesehen wurde. Die weiteren Pflanzen wurden montiert und eingestellt. Je nach Größe konnten bis zu 25 Pflanzen auf der gemeinsamen Unterlage aufgestellt werden. Bei einer Aufnahmefrequenz von 15 Bildern pro Stunde und Pflanze (von jeder Pflanze alle vier Minuten eine Aufnahme) konnten etwa 15 Pflanzen simultan aufgezeichnet werden. Wenn der gesamte Verfahrweg der Einheit ausgenutzt wurde, betrug dann der Abstand zwischen zwei Pflanzen etwa 1,5 cm. Videobilder besitzen normgemäß ein Verhältnis von Breite zu Höhe von 4:3. Da die Hypokotyle schmale, senkrecht stehende Objekte sind, wurden sie mit einer um 90° gekippten Kamera aufgenommen. So konnten die darstellbare Bildfläche und Auflösung optimal ausgenutzt werden. Für eine naturgetreue Darstellung am Bildschirm wurde das Kamerabild dann wieder per Software um 90° gedreht. Die Kameras befanden sich vom Experimentator aus gesehen hinter den Pflanzen. Bewegte man eine Pflanze beim Einrichten nach rechts, rutschte sie auf dem entsprechenden Videobild nach links. Da dies einem intuitiven Arbeiten beim Montieren widersprach, wurden die Videobilder im Einstellprogramm zusätzlich noch um ihre vertikale Achse gespiegelt. Das Aufnahmescript "scan" diente dazu, die Anlage mit Hilfe des Endschalters des Druckers neu zu kalibrieren, nacheinander die einzelnen gespeicherten Pflanzenpositionen anzufahren, die Bilder aufzunehmen und die Datenkompression, Datenspeicherung und Auswertung zu starten. Nachdem die Anlage die jeweilige Aufnahmeposition erreicht hatte, wurde noch etwa eine Sekunde gewartet, um mechanische Schwingungen ausdämpfen zu lassen. Dann wurden zunächst mit der einen, dann mit der anderen Kamera mit maximaler Geschwindigkeit viele Bilder der Pflanze aufgenommen und anschließend gemittelt. Die Kameras waren an den beiden Base-Band-Eingängen der Framegrabberkarte angeschlossen. Das Aufnahmescript "scan" wurde in einem vorgegebenen zeitlichen Rhythmus, beispielsweise alle vier Minuten, gestartet. Mit der letzten Pflanze war ein Aufnahmezyklus beendet. 2.4.3.5.2 Dreidimensionale Verfahreinheit Mit der dreidimensionalen Verfahreinheit sollten auch wesentlich größere Abbildungsmaßstäbe als bei der eindimensionalen Anlage realisiert werden. Die Samen oder Keimlinge genau im Fokus beider Kameras manuell zu positionieren war daher besonders schwierig. Für diese Verfahreinheit wurde deshalb das Programm "3d-einstellen" für die grafische Linux-Oberfläche "X" entwickelt, das die Bewegungsmöglichkeit der Anlage in allen drei Achsen ausnutzt. Auch bei diesem Programm wurden die Bilder beider Kameras in zwei nebeneinander liegenden Fenstern in Echtzeit angezeigt. Die Samen oder Keimlinge wurden manuell auf eine geeignete Unterlage gesetzt, so dass sie sich ungefähr in der Mitte beider Kamerabilder befanden. Durch Anklicken des Samens oder Hypokotyls im Bildfenster der linken und rechten Kamera wurde die Position der Verfahreinheit automatisch so verändert, dass dann das Objekt genau in der Mitte des jeweiligen Fensters dargestellt wurde. Die laterale Position im jeweils anderen Fenster veränderte sich dabei nicht. Außerdem konnte die Vertikalposition jeder einzelnen Pflanze verändert werden. Auf eine mechanische Anpassung der Pflanzenunterlage an die Verfahreinheit, wie sie bei der eindimensionalen Anlage mit Hilfe von Hebebühnen realisiert worden war, konnte deshalb verzichtet werden. Vor jedem Versuch wurden so die Koordinaten aller Pflanzen manuell festgelegt und automatisch abgespeichert. Während des Versuchs wurden die einzelnen Aufnahmepositionen stets so angefahren, dass der Kameraträger immer auf der gleichen Seite der Spindeln der Linearantriebe der Verfahreinheit ruhte. Dadurch wurden Ungenauigkeiten durch Spiel vermindert. Außerdem wurde ein regelmäßiges Muster von hellen und dunklen Flächen auf einer Ebene unterhalb der Pflanzenauflage angebracht und synchron zum Versuch mit aufgenommen. Damit konnte die Bildlage in horizontaler Richtung in Bezug auf die Position der Verfahreinheit nachkorrigiert und Ungenauigkeiten rechnerisch korrigiert werden. Mit einem html-Interface ließ sich der gesamte Versuch über das Internet beobachten und steuern. Auf einer Webseite wurden für jede Pflanze die Bilder der linken und rechten Kamera als "thumbnails" dargestellt. Durch Anklicken konnten diese Bilder auch größer dargestellt werden. Sie wurden als komprimierte jpg-Dateien übertragen, um die Ladezeiten der Bilder in Grenzen zu halten. Es war manchmal erforderlich, die Aufnahmeposition einer Pflanze im laufenden Versuch korrigieren zu können. Wenn die gesamte Entwicklung einer Pflanze vom Samen zum Keimling dokumentiert werden sollte, verwurzelte dieser meist nicht genau an der Stelle, an der der Same ursprünglich gelegen hatte. Diese laterale Korrekturmöglichkeit ließ sich ebenfalls über das html-Interface durchführen. Bei der dreidimensionalen Verfahreinheit wurden die Kameras nicht wie bei der eindimensionalen Anlage hochkant montiert. Sobald die Pflanze nicht mehr in ein Bild passte, wurden zusätzliche Bilder aufgenommen. Auf der Webseite wurden dann alle übereinander liegenden Bilder dargestellt. Nach Versuchsende wurden dann diese Bilder einer Pflanze (unter eventueller Berücksichtigung der Bildlagekorrekturdaten) rechnerisch zu einem einzigen Gesamtbild zusammengefügt. Das Hinzuschalten neuer Bilder zum Registrieren zu langer Pflanzen erfolgte ebenfalls über das html-Interface. Weitere wichtige Versuchsdaten wie Dauer eines scans, freie Speicherkapazität der Festplatten, Koordinaten jeder Pflanze etc. wurden ebenfalls angezeigt und fortlaufend aktualisiert. Über einen link war für jede Pflanze eine Liste mit allen Originalaufnahmen erreichbar. Durch Anklicken konnten beliebige Bilder heruntergeladen werden. 2.4.3.6 Programme zum Speichern der Bilddaten und zur Datenreduktion Jeder Pflanze wurde anhand ihrer Positionsnummer ein eigenes Aufnahmeverzeichnis zugeordnet. In diesen Verzeichnissen wurden die Bilder unter einer fortlaufenden Nummer gespeichert. Neben der Bildnummer beinhaltet der Dateiname einen Zusatz "a" oder "b", um die rechte und linke Kamera zu identifizieren. Die Gesamtheit aller Informationen über eine Pflanze wurde von uns als "Kanal" bezeichnet. Eine Aufgabe des Aufnahmescripts "scan" war, Programme zur Datenreduktion aufzurufen. Schon bei früheren Versuchen war klar geworden, dass die Datenmengen bei längeren Aufnahmen und ohne Komprimierung nicht mehr handhabbar sein würden. Insbesondere die synchrone Aufnahme mehrerer Pflanzen hätte auch größere Festplatten rasch zum Überlaufen gebracht. In einem ersten Ansatz wurde versucht, mit dem Standard-Kompressionsprogramm "gzip" die Dateigrößen zu reduzieren. Durch den relativ hohen Rauschanteil der Bilder war die erzielte Datenreduktion jedoch nur gering. Sie betrug lediglich etwa 50% der ursprünglichen Bildgröße von 432 KB[9]. Durch Mitteln mehrerer (kurz hintereinander aufgenommener) Bilder konnte der Rauschanteil deutlich gesenkt und die Qualität stark verbessert werden. Solche gemittelten Bilder ließen sich dank des einheitlich schwarzen Hintergrunds wesentlich besser komprimieren und benötigten je nach Größe und Struktur des Objekts nur noch 15 - 25 Prozent des ursprünglichen Speicherplatzes. Die Bilder aufzunehmen und zu mitteln war ziemlich rechenintensiv und dauerte entsprechend lange. Deshalb musste bei hohen Aufnahmefrequenzen ein Kompromiss zwischen Anzahl der aufzunehmenden Pflanzen und Anzahl der zu mittelnden Bilder gefunden werden. Pro Sekunde ließen sich ca. 4 bis 6 Bilder digitalisieren und mitteln. Die Zahl der zu mittelnden Bilder ließ sich als Parameter im Aufnahmescript "scan" angeben. Eine gute Bildqualität wurde zwischen 50 bis 100 gemittelten Aufnahmen erreicht. Aber bereits bei 25 gemittelten Bildern war die Qualität viel besser und die Daten konnten beim komprimierten Speichern der Dateien beträchtlich reduziert werden. Um die Dateigröße noch stärker zu reduzieren, wurde ein Algorithmus entwickelt, mit dem die Pflanzen vor ihrem Hintergrund freigestellt werden konnten. Unnötige Bildinhalte, nämlich der verrauschte Hintergrund, wurden durch einheitliches Schwarz ersetzt. Die so komprimierten Dateien besaßen nur noch etwa 10% der ursprünglichen Größe, durchschnittlich 30-50 kB. Versuche, die Daten mit Kompressionsverfahren wie JPEG oder MPEG noch stärker zu reduzieren, schlugen fehl oder wurden aus prinzipiellen Gründen nicht angewendet. Eine verlustbehaftete Datenreduktion mit JPEG reduziert den Informationsgehalt der Bilder und schied deshalb aus. Verlustfreie JPEG Komprimierung lieferte größere Dateien als "gezipte" Bilder. Der Versuch, die Gesamtdatenmenge eines Versuchs durch Abspeichern von Differenzbildern zu reduzieren, führte zu keinem befriedigenden Ergebnis. Dies lag an dem hohen Rauschanteil, mit dem die einzelnen Bilder trotz Mittelung noch behaftet waren. Für bessere Hardware, insbesondere hochauflösende, rauscharme Kameras, standen keine finanziellen Mittel zur Verfügung. 2.4.3.7 Programme zum Eichen der Anlagen, zum Einstellen verschiedener Kamerawinkel usw. 2.4.3.7.1 Programm zum Eichen der eindimensionalen Verfahreinheit Für die Stereoaufnahmen standen leider keine zwei identischen Kameras und auch keine identische Optik zur Verfügung. Deshalb war es notwendig, den Auswerteprogrammen Angaben über den jeweiligen Abbildungsmaßstab übergeben zu können. Mit dem Einstellprogramm "s1" konnte die Höhe der Abbildung einer Pflanze in den Bildern beider Kameras markiert werden. Die Werte wurden dann an die Auswerteprogramme übergeben. Unterschiede im Abbildungsmaßstab der Kameras ließen sich so rechnerisch korrigieren. In diesem Programm wurde auch der Kamerawinkel abgefragt. 2.4.3.7.2 Programm zum Zusammensetzen von Teilbildern und zum Eichen der dreidimensionalen Verfahreinheit Da bei der dreidimensionalen Verfahreinheit die Pflanzen in mehreren übereinander liegenden Teilbildern aufgenommen wurden, mussten die Teilbilder rechnerisch zu einem Gesamtbild zusammengesetzt werden, um sie betrachten und auswerten zu können. Alle übereinander liegenden Teilbilder einer Pflanze wurden mit einer Überlappung von ca. 25% aufgenommen. Um später die genaue Lage der Teilbilder zueinander bestimmen zu können, wurden die überlappenden Bereiche rechnerisch korreliert. Hierzu wurden aus beiden Bildern die Gradientenbilder berechnet. Für jede Verschiebung der Bilder gegeneinander im überlappenden Bereich wurde der Korrelationskoeffizient ermittelt. Dies ergibt zweidimensionale Korrelationsmuster, die als sogenanntes Korrelationsbild abgespeichert wurden. Der Punkt der besten Korrelation (die hellste Stelle des Korrelationsbildes) entsprach der Stelle, an der die Originalbilder am besten zusammen passten. Um die Güte des Verfahrens zu prüfen, wurden alle Korrelationsbilder eines Versuches übereinander gelegt oder als Videosequenz betrachtet. Es zeigte sich, dass der Punkt der besten Korrelation innerhalb eines Versuches tatsächlich konstant blieb. Da bei einer Pflanze mehr als zehn Teilbilder übereinander liegen konnten und zudem die Bilder beider Kameras zusammengesetzt werden mussten, war dieses Verfahren für die Auswertung ganzer Versuchsserien zu rechenintensiv. Selbst mit einem neu erworbenen Rechner mit 900 MHz Taktrate dauerte die Korrelation aller Bilder einer einzigen Pflanze mehrere Tage. Deshalb wurde ein zweistufiges Verfahren angewendet, bei dem zunächst jeweils nur einige scans eines Versuches in weiten Bereichen (10000 korrelierte Pixel, Rechenzeit ca. 1 min.) korreliert wurden. Diese Vorergebnisse erlaubten dann, nur noch sehr kleine Bereiche aller aufeinander folgenden Bilder zu korrelieren, was wesentlich rascher zu Ergebnissen führte (250 korrelierte Pixel, Rechenzeit ca. 1,5 s). Mit Hilfe dieser Endergebnisse wurden dann alle Bilder eines Versuchs zu einem Gesamtbild zusammengesetzt. Zur Sicherheit war bei den Versuchen zu jeder Pflanze bei jedem scan noch ein Referenzbild aufgenommen worden. Diese Bilder stammten von einem schwarzen Winkel, der auf der Unterlage der Pflanzen mittels Klebefolie angebracht worden war. Die Pflanzen standen genau über dem Winkel. Die Referenzbilder sollten notfalls zur Korrelation der eigentlichen Bilder untereinander dienen. Dank der mechanischen Präzision der Anlage konnte hierauf jedoch verzichtet werden. Wie bei der eindimensionalen Anlage mussten auch bei der dreidimensionalen Anlage Unterschiede im Abbildungsmaßstab der beiden Kameras berücksichtigt werden. Dieser Eichvorgang wurde mit den zusammengesetzten Bildern in ähnlicher Weise wie zuvor beschrieben durchgeführt. 2.4.3.8 Programme zur Visualisierung von Wachstumsvorgängen, die auf lokalen Helligkeitsunterschieden der Objekte basieren ("natürliche Markierungen") 2.4.3.8.1 Visualisierungsprogramm für nur eine Videokamera Werden Hypokotyle verschiedener Pflanzenarten mit einer hochwertigen Videokamera bei stärkerer Vergrößerung und entsprechender Beleuchtung betrachtet, ist ein charakteristisches Hell-Dunkel-Muster zu erkennen. Die lokalen Helligkeitsunterschiede basieren vermutlich auf Reflexionen an Zellgrenzen, Unregelmäßigkeiten der Kutikula und möglicherweise auch auf Zellorganellen. Sie waren Orts-konstant und vermutlich mit einzelnen Zellen oder Zellgruppen der Epidermis assoziiert. Somit ließen sie sich als "natürliche Markierungen" verwenden, mit deren Hilfe das lokale Wachstumsverhalten der Pflanzen beschrieben werden konnte. In einer ersten Programmversion, dem Programm "xxx", das noch für die erste Verfahreinheit und für nur eine Kamera entwickelt worden war, wurde die Helligkeitsverteilung im Verlauf des Stängels für jeden scan ermittelt. Grundlage dafür war eine automatische Stängelerkennung, die die Lage und den Verlauf des Stängels im Kamerabild ermittelte. Da die Pflanzen lokale Krümmungen aufwiesen, die zeitlichen Änderungen unterlagen, wurden zunächst alle Krümmungen herausgerechnet, um ein "geradegezogenes" Bild der Pflanze zu erhalten. Die Position der Stängelmitte wurde bestimmt und in einer Auswertedatei abgespeichert. In der ersten Programmversion wurden nur die Informationen einer Kamera berücksichtigt. Deshalb konnten Krümmungen der Pflanze, die genau auf die Kamera zu oder von ihr weg erfolgten, nicht erfasst werden. Trotz dieser Einschränkung war das Programm für eine erste Übersicht über das Wachstumsverhalten gut geeignet. Als Fixpunkt diente dabei die Hypokotylbasis, die auf der Unterlage festgewachsen war und die über den gesamten Versuchsverlauf keine räumlichen Veränderungen erfuhr. Der Durchschnitt aller Helligkeiten über den Stängelquerschnitt für jede einzelne Stängelhöhe in einem scan wurde ermittelt und in einer Datei abgelegt. Diese Auswertedatei erhielt die gleiche fortlaufende Nummer wie die dazugehörige Bilddatei sowie eine Namenserweiterung, die sie als Auswertedatei kennzeichnete. Die Auswertedateien wurden sofort nach der
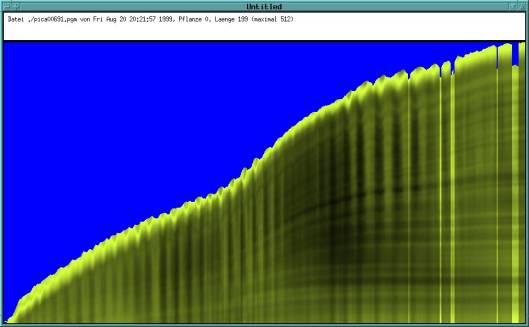
Aufnahme des jeweiligen Bildes erstellt. Die Entwicklung der Pflanzen
konnte also mit Hilfe dieser Dateien in Echtzeit verfolgt werden. Zeitlich aufeinanderfolgende Streifen wurden direkt nebeneinander abgebildet, was eine Darstellung der zeitlichen Entwicklung von Helligkeitsverteilungen über den Stängel ergab. Die Darstellung des Zeitverlaufs erfolgte in einem Fenster, dessen Höhe auf die größte Pflanzenhöhe innerhalb eines Versuchs skaliert war und dessen Breite sich aus der Summe aller scans im jeweiligen Versuch ergab. Da die Pflanze im Lauf eines Versuchs wuchs, waren die ersten Streifen natürlich wesentlich kürzer als der letzte. Der Hintergrund des Fensters oberhalb der einzelnen scans wurde blau dargestellt. Diese Darstellungsart wird künftig als Zeitverlaufsfenster bezeichnet. Mit dem Programm "xxx" konnte das aktuelle Bild der Pflanze in einem weiteren Fenster, künftig als Bildfenster bezeichnet, angezeigt werden, indem eine beliebige Stelle des Zeitverlaufsfensters angeklickt wurde. Bewegte man den Mauszeiger im Zeitverlaufsfenster in Richtung der Zeitachse, wurde im Bildfenster jeweils das Bild der Pflanze dargestellt, das der aktuellen (zeitlichen) Position des Zeigers entsprach. Die Uhrzeit der jeweiligen Aufnahme sowie die aktuelle Scannummer wurden dabei sowohl im Bildfenster als auch im Zeitverlaufsfenster in Abhängigkeit von der Position des Mauszeigers angezeigt. Auch im Bildfenster bestand die Möglichkeit, zeitlich zu navigieren. Das Bildfenster war so eingerichtet, dass durch einmaliges Anklicken einer Stelle, die sich nur wenig rechts der Bildmitte befand, jeweils das nächste Bild angezeigt wurde. Klickte man nahe des rechten Bildrands auf das Bild, sprang die Darstellung um 10 Bilder nach vorn. Proportional zur Entfernung von der Bildmitte konnte durch Anklicken auch jedes n-te Bild mit n<=10 erreicht werden. Analog konnten auch frühere Bilder durch Klicken auf Bereiche links der Bildmitte angesteuert werden. Durch mehrfaches Anklicken konnte das Wachstum der Pflanze so als Zeitrafferfilm mit variabler Geschwindigkeit und Richtung betrachtet werden. 2.4.3.8.2 Visualisierungsprogramm zur Auswertung der Stereo-Bilddaten Um die dreidimensionalen Bewegungen der Versuchsobjekte über die Zeit erfassen zu können, wurden die Auswerteprogramme "t2" und "t4" entwickelt, die die Daten beider Videokameras berücksichtigten. Das Programm "t2" führte die Stängelerkennung durch und speicherte die Daten der Stängelmitte in jeder Pixelzeile ab. Das Programm wurde für beide Stereobilder getrennt aufgerufen. Aus diesen Daten und einem der Original-Stereobilder berechnete das Programm "t4" ein Kunstbild, das die Pflanze im geradegezogenen Zustand zeigte. Der Ansatz für diese Programme glich dem Programm "xxx" insofern, als auch hier zunächst die Bilder der einzelnen Kameras geradegerechnet wurden. Die Lage der Stängelmitten in Bezug zur Bildmitte und die Länge des jeweiligen (etwas mehr als ein Pixel hohen) Stängelsegments wurde in dem Kunstbild gespeichert. Um eine ganze Serie von Bildern auszuwerten, wurden die Programme "t2" und "t4" durch das Auswertescript "aus" algorithmisch für alle Aufnahmen eines Versuches gestartet. Durch Kombination der Verschiebungsvektoren beider Kameras konnte so die räumliche Lage der einzelnen Punkte der Pflanze beschrieben werden. Die ausgewerteten Dateien wurden mit
dem Programm "x1"
ähnlich wie zuvor im Programm "xxx"
beschrieben dargestellt, wobei allerdings die dreidimensionale
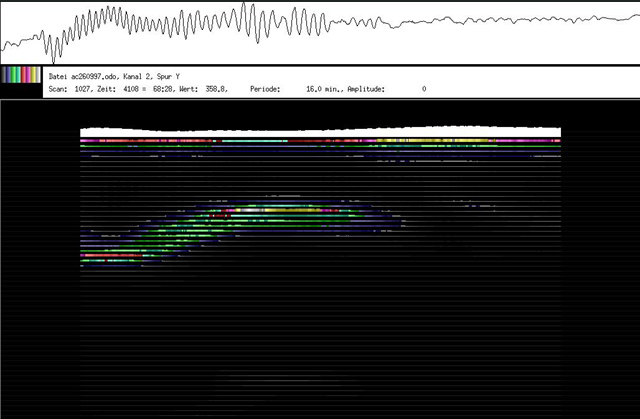
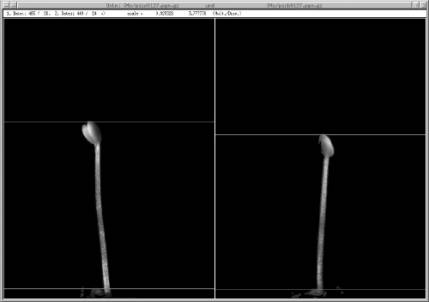
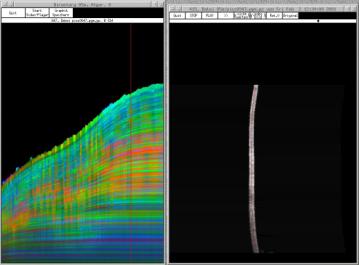
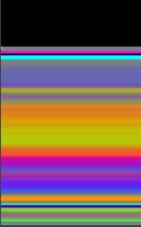
Ausrichtung der Pflanzen berücksichtigt wurde. Das Programm "x1" produzierte ein Zeitverlaufsfenster, das ähnlich aufgebaut war wie im Programm "xxx". Aufnahmen wachsender Hypokotyle lieferten Muster aus farbigen Streifen. Diese Streifen stellten die von Krümmungen und Neigung der Pflanze bereinigte, vertikale Verschiebung der einzelnen "natürlichen Marker" über die Zeit dar.
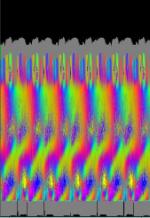
Abbildung 2-13: Links: Ausschnitt aus dem Zeitverlaufsfenster (Versuch LT_LL2_2), scans 500-999. Die horizontale Verteilung der Helligkeit über den Stängelquerschnitt wurde farblich kodiert. Hierzu wurde der Stängel in einen linken, mittleren und rechten Bereich eingeteilt und den drei Bereichen je eine der drei Grundfarben der additiven Farbmischung rot, grün und blau zugeordnet. Die durchschnittliche Helligkeit eines jeden Bereichs wurde durch die Luminanz der entsprechenden Grundfarbe kodiert. Jeder scan ist ein ein Pixel breiter Streifen auf dem Bildschirm, bei dem für jeden Stängelquerschnitt die verschieden farbigen Darstellungen des linken, mittleren und rechten Bereichs und die Helligkeit in einem Pixel addiert sind. Rechts: Aufnahmen der linken und rechten Kamera zum Zeitpunkt des letzten scans (999) des Zeitverlaufsfensters. Der rote Streifen im unteren Bereich des Zeitverlaufsfensters rührt von einer deutlichen Unregelmäßigkeit auf dem Hypokotyl her. Als Erweiterung des Programms "xxx" war das Programm "x1" auch mit einem "Videoplayer" "v2" assoziiert, der durch Anklicken einer Schaltfläche gestartet werden konnte. Bei eingeschaltetem Videoplayer wurden die korrespondierenden Bilder als Film dargestellt. Diese Bilder sind keine Originalbilder, sondern aus den Daten der Stängelerkennung generierte Kunstbilder. Es konnte zwischen dem Bild der rechten und linken Kamera im Originalzustand oder auch im gerade gerechneten Zustand gewählt werden. Außerdem wurde eine Darstellungsweise zur Stereo-Betrachtung mit Hilfe einer Rot-Grün-Brille vorgesehen. Mit dem Videoplayer kann eine Serie von Bildern als Film vorwärts oder rückwärts betrachtet werden. Es konnte eingestellt werden, ob jedes Bild oder nur jedes n-te Bild angezeigt werden sollte. Hiermit ließ sich eine Art schneller Vor- und Rücklauf erzielen. Bei laufendem Player wurde die korrespondierende Stelle im Zeitverlaufsfenster durch eine vertikal rote Linie markiert, die sich entsprechend der Abspielgeschwindigkeit über das Fenster bewegte. 2.4.3.8.2.1 Darstellung der Krümmung im Zeitverlaufsfenster Neben der Darstellung von reinen Wachstumsbildern wurden auch Verfahren entwickelt, mit denen die lokale Krümmung des Stängels auf der jeweiligen Stängelhöhe dargestellt werden konnte. Richtung und Betrag einer Krümmung wurden durch Farbe und Farbintensität kodiert. Für die farbliche Kodierung der Richtung bot sich ein spektraler Farbkreis an. Mit ihm konnte jeder Richtung im Raum über einen Winkel von 360 ° eine eigene Farbe zugewiesen werden. Der Betrag der Krümmung wurde mit Farbsättigung und Helligkeit kodiert. Bei dieser Auswertung wurden lokale Helligkeitsunterschiede der Stängelsegmente, die für die Darstellung der Wachstumsbilder entscheidend gewesen wären, nicht berücksichtigt. Ein solcher Kreis konnte zum Vergleich neben dem Zeitverlaufsfenster abgebildet werden. Versuche mit verschiedenen Varianten des Farbkreises wurden durchgeführt. Die besten Ergebnisse und die größte Anschaulichkeit wurde mit einem Kreis erreicht, der in der Mitte dunkel gefärbt war (keine Krümmung). Weiter zur Peripherie hin wurde die Intensität der dieser Richtung entsprechenden Farbe immer größer. Eine andere Variante des Farbkreises, bei der eine Krümmung mit dem Betrag null durch ein reines Weiß kodiert wurde, und größere Beträge durch eine größere Farbsättigung eines weißen Hintergrunds dargestellt wurden, war weniger übersichtlich. Ein absolut ungekrümmtes Objekt, z.B. eine Stahlnadel, die zu experimentellen Zwecken aufgenommen wurde, kodierte, wenn es mit Krümmungsalgorithmen ausgewertet wurde, mit der ersten Variante komplett schwarz, mit der zweiten Variante rein weiß. Dies war unabhängig davon, ob die Nadel senkrecht oder schief in bezug auf die Kameras stand. Verschiedene Algorithmen zur Darstellung der Krümmung wurden entwickelt, die im Programm "x1" ausgewählt werden konnten. Algorithmus 4: Die Farbkoordinaten u und v berechnen sich als die zweite Ableitung über der Höhe der Stängelmittenachse, d.h. der Krümmung. Algorithmus 5: Um die Krümmung zu berechnen, muss zwei mal abgeleitet werden. Für die erste Ableitung wurde hier nicht die Differenz zweier direkt übereinander liegender Scheiben berechnet, sondern die Differenz zweier in einem Abstand von 5 Pixeln liegender Scheiben. Die zweite Ableitung, die das Krümmungsmaß ist, wurde aus zwei sich so ergebenden aufeinander folgenden ersten Differenzen berechnet. Algorithmus 6: Die Berechnung der Krümmung erfolgte wie bei Algorithmus 5. Zusätzlich wurden Farbsättigung und Helligkeit mit zunehmender Krümmung verstärkt, um den Betrag der Krümmung optisch besser hervorzuheben. Algorithmen 7-9: Die Berechnung der Krümmung erfolgte wie bei Algorithmus 6. Für die erste Ableitung wurden hier nicht die Differenz zweier im Abstand von 5 Pixeln übereinander liegender Scheiben berechnet, sondern die Differenz zweier Scheiben in einem für den Algorithmus bestimmenden Abstand. Der Abstand war bei Algorithmus 7: 10 Pixel; bei Algorithmus 8: 35 Pixel, bei Algorithmus 9: 80 Pixel.
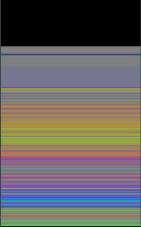
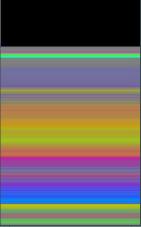
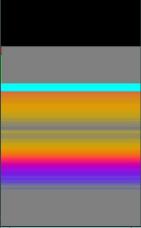
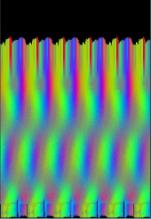
Abbildung 2-17: Zeitverlaufsbilder des gebogenen Drahts, der unbewegt aufgenommen und mit den verschiedenen Krümmungsalgorithmen ausgewertet wurde. Algorithmus 4: Die Farbkoordinaten u und v berechnen sich als die zweite Ableitung über der Höhe der Stängelmittenachse, d.h. der Krümmung. Algorithmus 5: Krümmungsberechnung durch zweimalige Ableitung. Details siehe Text. Algorithmus 6: Krümmungsberechnung wie bei Algorithmus 5, aber Farbsättigung und Helligkeit mit zunehmender Krümmung verstärkt. Algorithmen 7-9: Krümmungsberechnung wie bei Algorithmus 6. Für die erste Ableitung Differenz zweier Scheiben im Abstand 10 Pixel, Algorithmus 8: 35 Pixel, Algorithmus 9: 80 Pixel Neben den Algorithmen zur Darstellung der Krümmung wurde auch ein "Verschiebungsalgorithmus" entwickelt: Algorithmus 2: Die Farbkoordinaten u und v berechnen sich als die erste Ableitung über der Höhe der Stängelmittenachse, d.h. der horizontalen Verschiebung übereinander liegender gleich hoher Scheiben des gerade gerechneten Stängels zueinander. Der selbe gebogene Draht, der auf den Stundenzeiger eines Weckers montiert und über mehrere Tage aufgenommen worden war, zeigte einen typischen Farbverlauf, der das gesamte Spektrum überstrich und sich nach 12 Stunden wiederholte. Um die Animation
zu starten klicken Sie bitte auf das Player-Symbol der gewünschten
Version
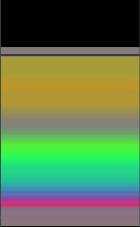
Abbildung 2-20: Zeitverlaufsbilder eines gebogenen Drahts, der auf den Stundenzeiger eines Weckers montiert worden war und mit den verschiedenen Krümmungsalgorithmen (siehe Abbildung 2-17) ausgewertet wurde.
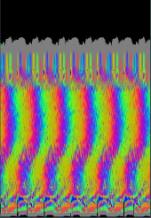
Abbildung 2-21: Zeitverlaufsbild des gebogenen Drahts, der auf den Stundenzeiger eines Weckers montiert worden war und mit dem Verschiebungsalgorithmus (siehe Abbildung 2-18) ausgewertet wurde. Die Zeitverlaufsbilder von Algorithmus 4 waren deutlich von Rauschen behaftet, was teils von Unregelmäßigkeiten der Drahtoberfläche, teils von Rundungsfehlern bei der Auswertung und vom Rauschen der Kameras herrührt. Bei den Algorithmen 5 und 6, bei denen über eine Höhe von 5 Pixeln gemittelt wurde, war das Rauschen weniger stark ausgeprägt. Algorithmus 7 lieferte bei diesem Objekt das beste Ergebnis. Die Algorithmen 8 und 9, bei denen über 35 bzw. 80 Pixel gemittelt wurde, waren hier weniger gut geeignet. Das Mitteln über weit auseinander liegende Bereiche führte zu verzerrten Ergebnissen. Die Zeitverlaufsbilder des Verschiebungs-Algorithmus 2 waren wenig mit Rauschen behaftet, da hier im Gegensatz zu den Krümmungsalgorithmen nur einmal abgeleitet werden musste. 2.4.3.9 Horizontale Filterung der mit den Krümmungsalgorithmen ausgewerteten Zeitverlaufsbilder Bei der Auswertung war es wichtig, zeitliche Änderungen der Krümmung des Hypokotyls darzustellen. In den mit den Algorithmen 4 bis 9 ausgewerteten Zeitverlaufsbildern wurden die Krümmungen des Stängels für jede Stängelhöhe und für jeden scan farblich kodiert dargestellt. Dadurch erschienen statische Krümmungen des Stängels, d.h. Krümmungen, die sich über längere Zeit nicht veränderten, als horizontale, farbige Banden. Diese überlagerten häufig kleine Veränderungen. Um kleine Krümmungsänderungen besser darzustellen, wurde versucht, einen Bildpunkt durch die Farbdifferenz zum horizontalen folgenden Nachbarbildpunkt zu ersetzen. Das bedeutet eine ausschließlich horizontale Differenzierung des Bildes. Das Verfahren liefert natürlich auch negative Differenzen. Um sie überhaupt darstellen zu können, wurde zu allen Werten ein mittleres Grau addiert. Dieses Verfahren lieferte zunächst fast rein graue Zeitverlaufsbilder. Um die kleinen Änderungen besser erkennen zu können, wurden vor der Addition des Grauwerts die gebildeten Differenzen mit einem "Verstärkungsfaktor" größer eins multipliziert. Es ergaben sich jedoch stark verrauschte Bilder, in denen die erhofften kleinen systematischen Veränderungen nur sehr schwach hervortraten. Die uns interessierenden Periodendauern von größer als 30 Minuten wurden von höherfrequenten Änderungen, die sich aus Kamerarauschen, kleinen Fehlern bei der Stängelerkennung und sonstigen von Bild zu Bild variierenden Ungenauigkeiten ergaben, überlagert. Deshalb wurde hinter den Differenzierer ein Tiefpass mit einstellbarer Grenzfrequenz gesetzt. Im einzelnen wurde dabei wie folgt vorgegangen:
Aus dem farbigen Zeitverlaufsbild wurden Pixel für Pixel
die Rot-, Grün- und Blauwerte (RGB-Werte) in Helligkeits-
und Farbwerte umgerechnet, wobei die Farbwerte in der u- und v-
Ebene beschrieben wurden (YUV-Werte). Daraus ergaben sich drei
getrennte Bilder, die jedes für sich gefiltert und anschließend
wieder in RGB-Werte zurückgerechnet wurden. Das dabei verwendete
Filter war ein lineares, nicht rekursives Filter in Direktform:
Jeder berechnete Bildpunkt ergab sich als Linearkombination aus
einer bestimmten Anzahl seiner Vor- und Nachfolger in ausschließlich
horizontaler Richtung. Dem Filterprogramm wurden die Koeffizienten
des zu berechnenden Filters als Parameter übergeben. Durch
entsprechende Parameterwahl konnte dadurch entweder ein reiner
Tiefpass, ein Differenzierer, eine Kombination aus beiden oder
ein Filter mit anderem Frequenzgang realisiert werden. Dazu gab
es ein Filterentwurfsprogramm, bei dem man die Grenzfrequenz des
Tiefpasses angeben konnte. Das damit berechnete Filter hatte einen
dreieckigen Frequenzgang, der bei Frequenz Null mit dem Wert Null
begann und bis zur Grenzfrequenz linear anstieg. Bei höheren
Frequenzen erreichte die Amplitude wieder Null. 2.4.3.10 Software zur Datenarchivierung Zur Archivierung und späteren Auswertung mit anderen Bildverarbeitungsprogrammen wurden die Rohdaten auf CD-ROM geschrieben. Dies erfolgte stets Kanalweise, d.h. die gesamten Versuchsdaten einer einzelnen Pflanze wurden in einem einzelnen Verzeichnis abgelegt. Einzelne Verzeichnisse wurden dabei nicht auf mehrere CD-ROMs verteilt, um die Entwicklung einer Pflanze über die ganze Versuchsdauer hinweg auf einem Datenträger betrachten zu können. Durchschnittlich bestand ein Versuch aus 15 Kanälen (Pflanzen). Um den Speicherplatz einer CD-ROM gut auszunutzen, wurde ein kleines Programm geschrieben, das die optimale Verteilung der unterschiedlich großen Kanäle automatisierte. Aufeinanderfolgende Versuche wurden hintereinander auf CD-ROM geschrieben. Da beim Schreiben von CD-ROMs Fehler auftreten können, wurde ein Vergleichsprogramm entwickelt. Die geschriebenen Daten wurden mit den Daten auf der Festplatte verglichen. Waren keine Fehler aufgetreten, wurden die Daten automatisch von der Festplatte gelöscht und der Speicherplatz für weitere Versuche freigegeben. [1] Komoto OS-45D (1/2“ CCD), Komoto OS-65D (1/3“ CCD) [2] Hauppauge; WinTV [3] verschiedene Modelle von Pentium 133 bis Pentium II 333, 64 –128 MB RAM, 4 – 10 GB Festplatte [4] Yashinon DS; Yashinon DS-M [5] VX301, 3 * 3 Stück, I = 1-50 mA [6] CPU 6502A (2MHz), VIA 6522A, EPROM 2764, CMOS-RAM 6164, ACIA (serielles Interface) 6850B [7] NEC P6 [8] CPV 4030; isel automation KG, Im Leibolzgraben 16, D-36132 Eiterfeld [9] (576 * 768 Pixel * 8 bit / Pixel) |













|
© copyright Andreas Neugebauer 2002 Optimiert für Microsoft Internet Explorer und Netscape Version 6 |
||